



Ciencia y Tecnología
La UE investiga la conducción autónoma totalmente segura
Trabaja en la coordinación de las distintas tecnologías de posicionamiento y navegación por satélite para garantizar que los vehículos sin conductor no causan accidentes graves
La Unión Europea se ha embarcado en varios proyectos simultáneos, a los que proporciona financiación, para desarrollar un sistema de conducción autónoma realmente seguro en el que no haya accidentes o, al menos, que estos no pasen de ser improbables incidentes menores sin consecuencias graves para los pasajeros o peatones.
La última de estas líneas de investigación dadas a conocer dotada de financiación europea es el proyecto PRoPART (Precise and Robust Positioning for Automated Road Transports), que seguirá activo hasta finales de 2019, y que está orientado a los vehículos automatizados y los conocidos como sistemas avanzados de asistencia a la conducción (ADAS).
En el proyecto participan empresas de automoción y centros de desarrollo de España (a través del instituto Ceit-IK4), Suecia, Alemania, y Hungría. Tal y como se detalla en su memoria, sus principales objetivos son desarrollar y demostrar una solución de posicionamiento de “alta disponibilidad” a través del desarrollo de un software que garantice la cobertura en “zonas de sombra” con los métodos actuales, como túneles, cañones o calles encerradas en edificios altos.
El sistema se está probando en simulaciones de situaciones en las que la conducción autónoma se somete a tal “estrés” que no se puede garantizar su total fiabilidad, como la incorporación de uno de estos vehículos a una autopista repleta de coches.
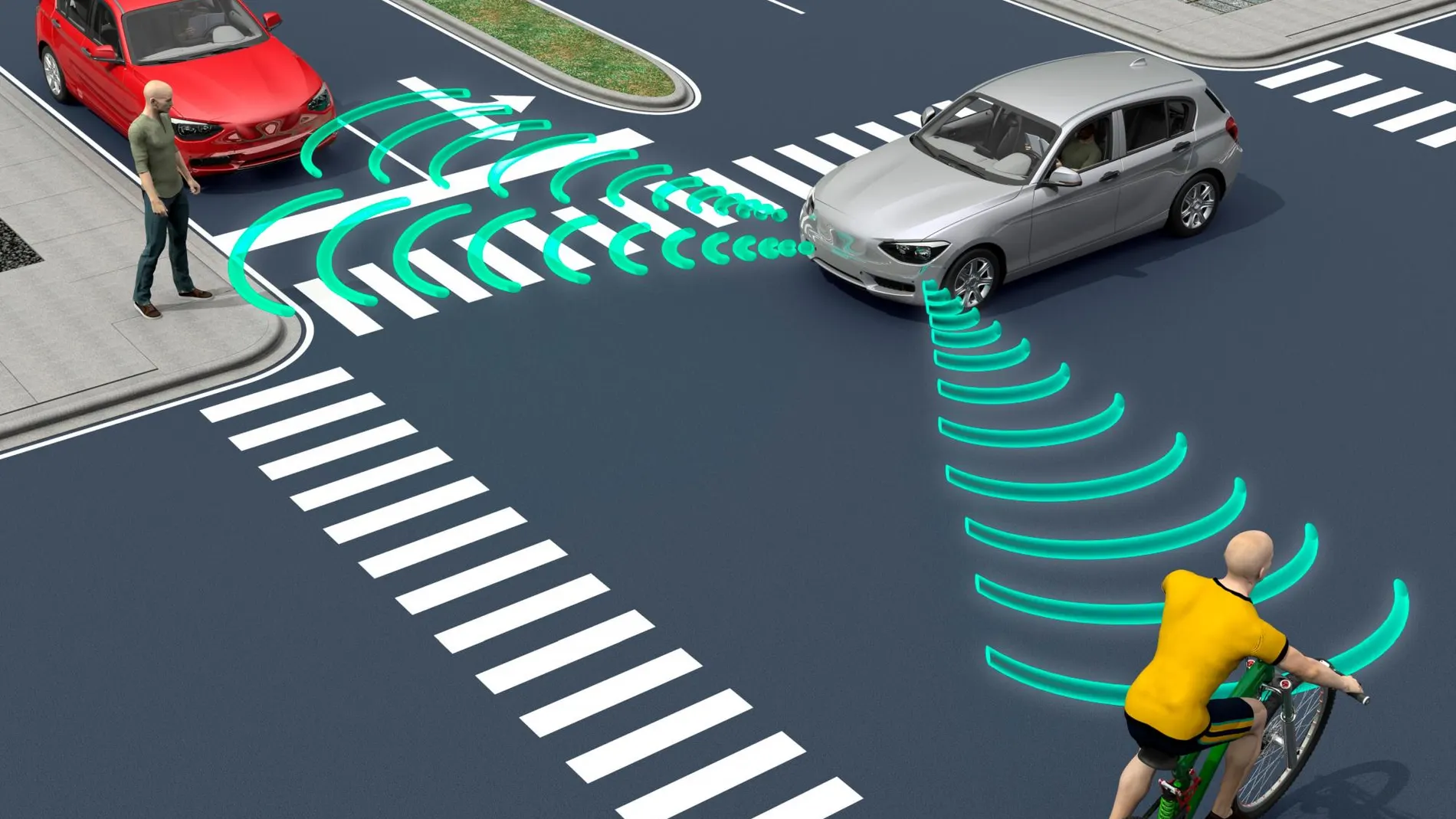
Para evitar que el exceso de información colapse las órdenes que recibe el vehículo, se establecerá un sistema combinado de sensores y posicionamiento preciso que garantizará, entre otras cosas, que la distancia con el automóvil de delante es la correcta.
El proyecto utiliza capacidades concretas del sistema mundial de navegación por satélite (GNSS) de Europa, Galileo, en combinación con otras tecnologías de localización y detección. Su trabajo es una mejora del software cinemático en tiempo real (RTK) desarrollado previamente por uno de los socios, como resume la agencia de la UE Cordis.
Los impulsores del proyecto son conscientes de que la clave para que la conducción autónoma sea una realidad, y no un mero entretenimiento de ciencia ficción, pasa por la “cooperación entre distintas tecnologías para determinar la posición real de un vehículo en la carretera y en relación a cualquier tipo de obstáculos».
«Ninguna tecnología por sí misma puede resolver esto en todas las situaciones, y cuando se combinan distintas tecnologías es fundamental comprender la integridad de la información disponible. PRoPART demostrará la tecnología de posicionamiento desarrollada en un camión capaz de conducir de forma automatizada en condiciones de autovía», añaden.De esta manera, PRoPART aprovechará contará entre otras cosas con una función de cambio de carril automatizado y colaborativo que “permita a un vehículo comercial pesado automatizado cambiar de carril con seguridad y determinación», según se explica en el sitio web del proyecto.
✕
Accede a tu cuenta para comentar


