
Ciencia y Tecnología
El brazo robótico que «mima» la fruta
Diseñan un robot capaz de manipular en los supermercados cualquier producto sin dañarlo
La manipulación industrial tiene sus ventajas, pero también sus riesgos cuando se trata de alimentos que después deben ser comercializados y que, ante el menor golpe o arañazo, están condenados a acabar en el cubo de basura.
Para garantizar que con tratados con el “mimo” que se merecen, la Unión Europea trabaja en un prototipo robótico que espera poder comercializar en todas las cadenas de distribución y supermercados, y que se desarrolla dentro de un programa pionero de manipulación robótica de objetos delicados y formas impredecibles, como frutas y verduras.
El proyecto, integrado por un grupo de investigadores de varias universidades europeas - Technische Universität Berlin (TUB), la Università di Pisa, el Istituto Italiano di Tecnologia, el Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR), el Institute of Science and Technology Austria, Ocado Technology y Disney Research Zurich- se enmarca dentro del programa Horizonte 2020, el proyecto SOMA (Soft-bodied intelligence for Manipulation), financiado con fondos de la UE.
Para llevarlo a cabo, se diseñaron pinzas de agarre para manipular los 48.000 artículos acumulados en los almacenes automatizados de Ocado, el mayor supermercado del mundo por Internet, y garantizar escasos daños a alimentos frágiles de una lista de la compra completa, según informa la UE.
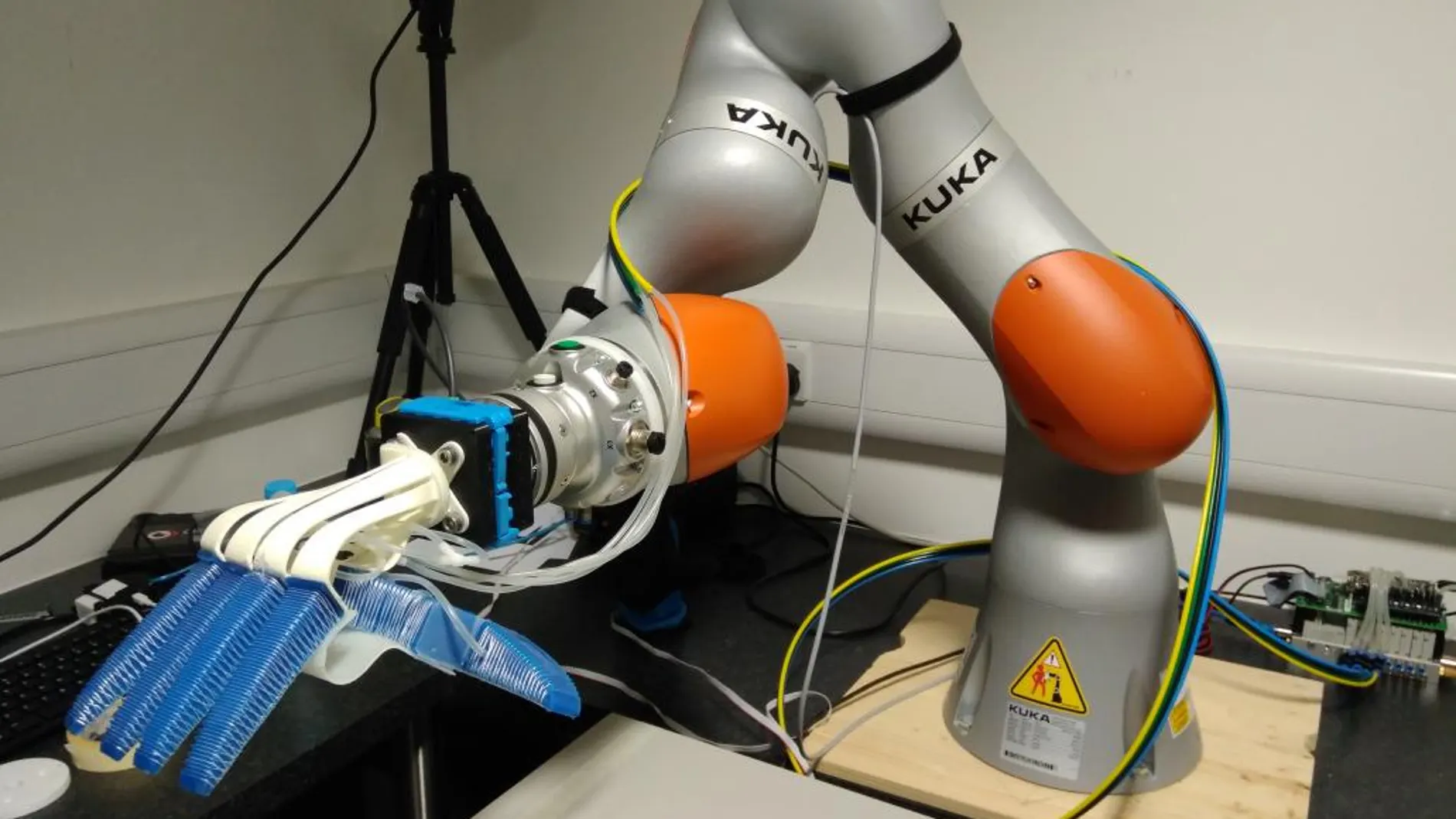
Para evitar dañar estos productos tan delicados, el proyecto recurrió a dispositivos de agarre compatibles (con propiedades similares a las de los muelles) unidos a brazos robóticos industriales.
Entre las distintas versiones desarrolladas, se emplean materiales flexibles de caucho y siete cámaras de aire comprimido controladas de forma individual para agarrar los objetos de forma segura y sin daños. El diseño hace posibles estrategias versátiles de agarre, ya que los dedos, la palma y el pulgar ajustan su forma a la geometría del objeto en cuestión (computación morfológica).
Los experimentos llevados a cabo con fruta artificial almacenada en una bandeja IFCO (International Fruit Container) pusieron de manifiesto que los manipuladores robóticos lograban agarrar frutas de formas distintas y revelaron la interesante particularidad de que la probabilidad de éxito aumentaba al utilizar los límites del entorno (por ejemplo, las paredes y el fondo de la bandeja) para restringir el movimiento del objeto.
✕
Accede a tu cuenta para comentar


