
Ciencia y Tecnología
Los nuevos robots para volver a andar
Una nueva generación de exoesqueletos “ponibles” permite prever y responder al movimiento de los usuarios en tiempo real
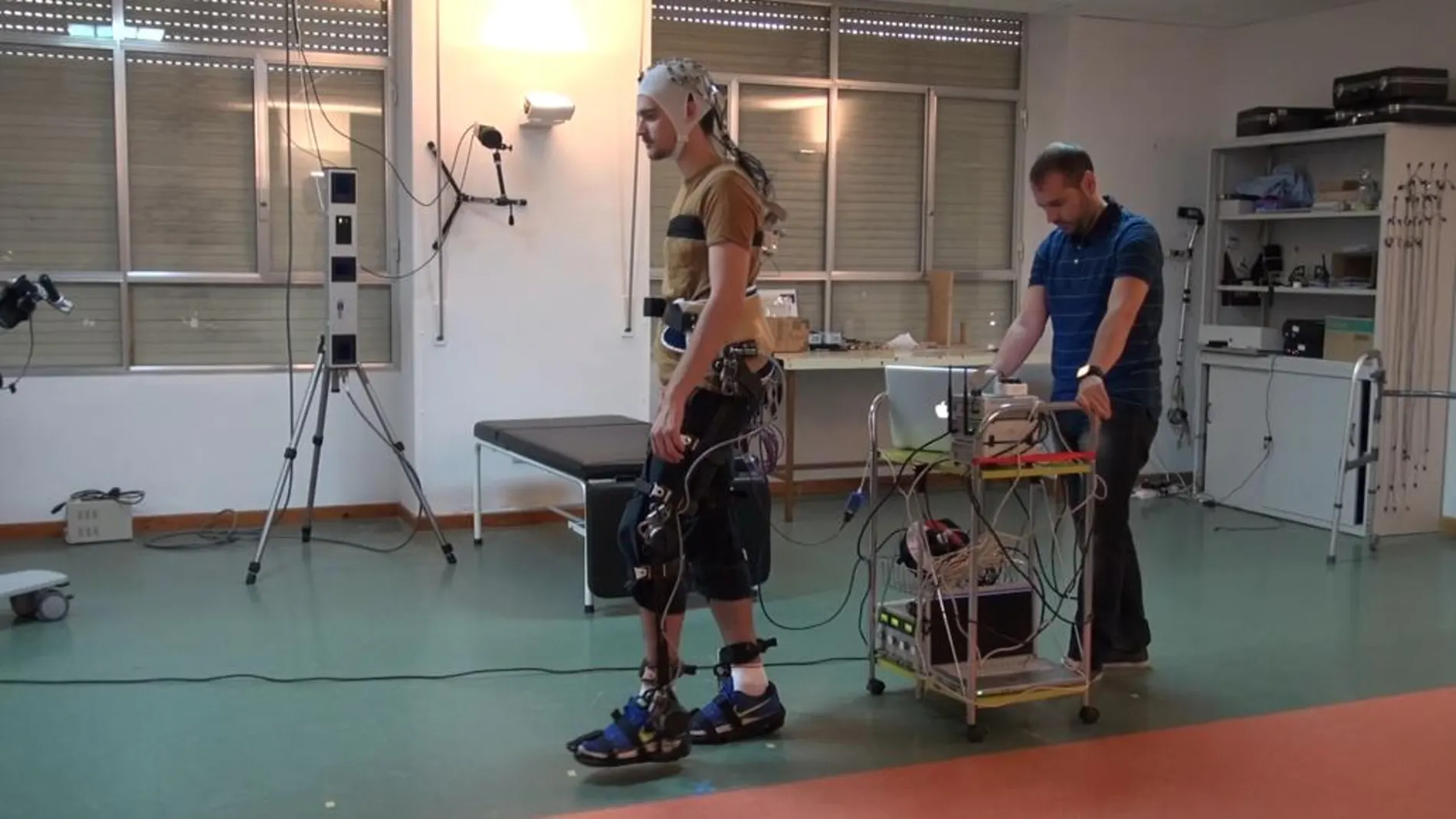
La robótica aplicada a la salud produce cada vez más sofisticados exoesqueletos, ingenios fabricados por el hombre que permiten sustituir a las funciones del cuerpo dañadas por una enfermedad o un accidente. Una nueva generación de robots “ponibles” mejora aún las prestaciones.
Gracias al proyecto de la Unión Europea BIOMOT, finalizado el pasado mes de septiembre de 2016, ha sido posible avanzar en este nuevo campo al demostrar que con modelos informáticos personalizados del cuerpo humano se puede controlar eficazmente los exoesqueletos ponibles.
El equipo del proyecto ha identificado formas de mejorar la flexibilidad y la autonomía, que podría contribuir al uso de robots ponibles como herramientas de rehabilitación y de movilidad asistida, según informa la agencia de la UE Cordis.
«Hay cada vez más interés, en el campo de la rehabilitación neurológica, en la posibilidad de utilizar estas tecnologías robóticas para la rehabilitación clínica de pacientes con enfermedades neurológicas», declaró el coordinador del proyecto BIOMOT, el Dr. Juan Moreno, del Consejo Superior de Investigaciones Científicas (CSIC) español. «Ello se debe en parte a que estos sistemas pueden optimizarse para realizar diferentes intervenciones terapéuticas en puntos específicos de recuperación o atención», añade.
No obstante, la comercialización masiva de los robots ponibles ha sido limitada por diferentes motivos. Moreno y su equipo determinaron que era necesario que el equipamiento ponible fuera más compacto y ligero, y que mejorara su capacidad de prever y detectar los movimientos que pretende realizar el usuario.
Además, los robots debían ser más versátiles y adaptables para ayudar a las personas en diferentes situaciones; por ejemplo, caminar en superficies irregulares o sortear un obstáculo.
Para resolver estas dificultades, el proyecto desarrolló robots con versatilidad y flexibilidad en tiempo real aumentando la simbiosis entre el robot y el usuario mediante interacciones sensomotoras dinámicas, destaca Cordis. Se aplicó una estrategia jerárquica en estas interacciones, y así el equipo del proyecto aplicó diferentes niveles según los objetivos. Ello permite personalizar los exoesqueletos para cada usuario.
Moreno confía en que el éxito del proyecto abra nuevas vías de investigación. Por ejemplo, con estos resultados los científicos podrán desarrollar métodos informáticos para tratamientos de rehabilitación y conocer más detalles del movimiento humano.
✕
Accede a tu cuenta para comentar


