



Nanotecnología
Este es el robot controlado a distancia más pequeño del mundo
Sus movimientos se controlan de forma remota y es capaz de caminar, girar, saltar y arrastrarse
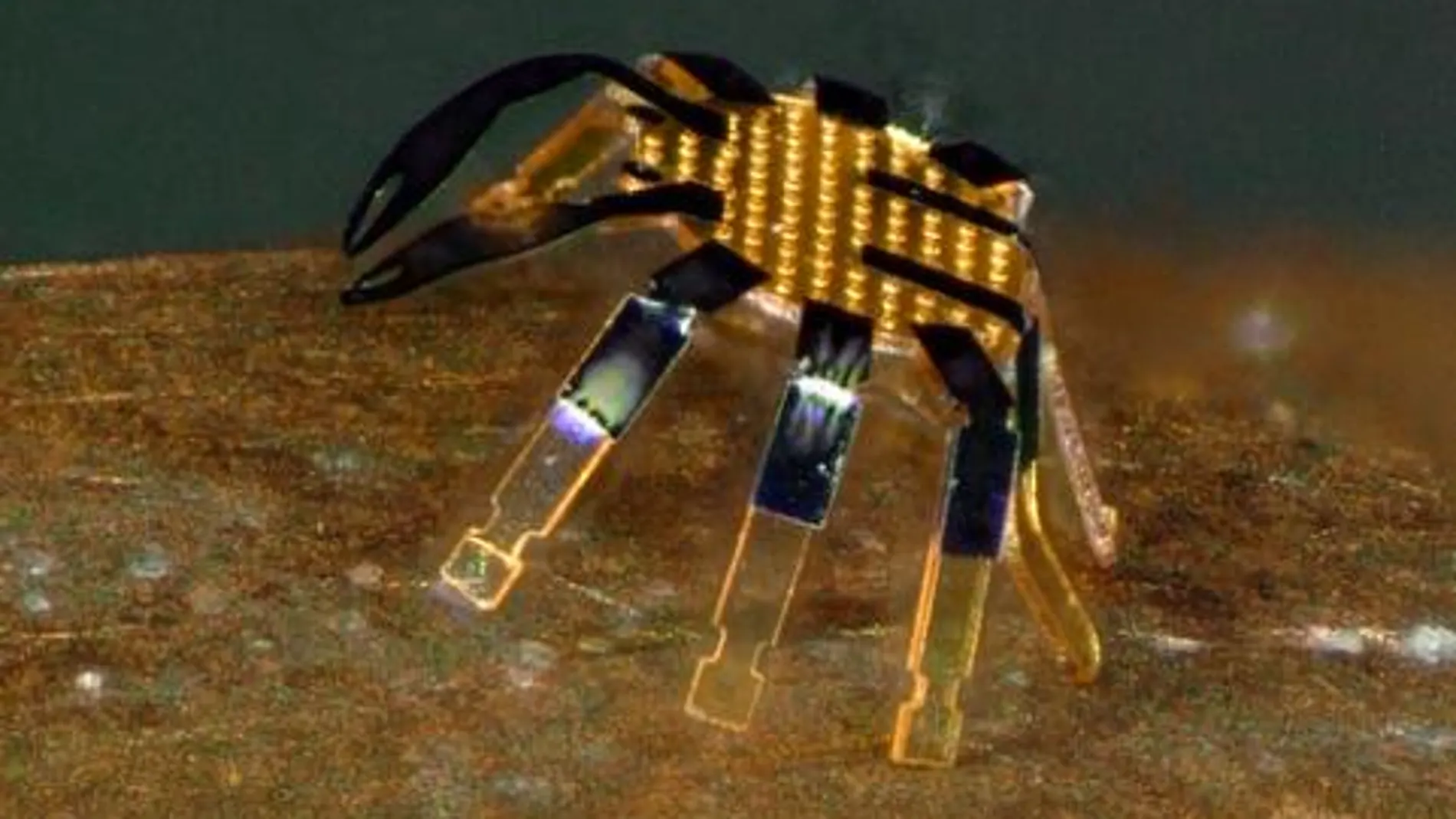
El mismo equipo de ingenieros de la Universidad de Northwestern que en septiembre pasado desarrolló la estructura voladora más pequeña jamás hecha por humanos, ahora han dado un paso más allá y han creado el robot a control remoto más pequeño jamás visto. Y su forma es la de un pequeño cangrejo.
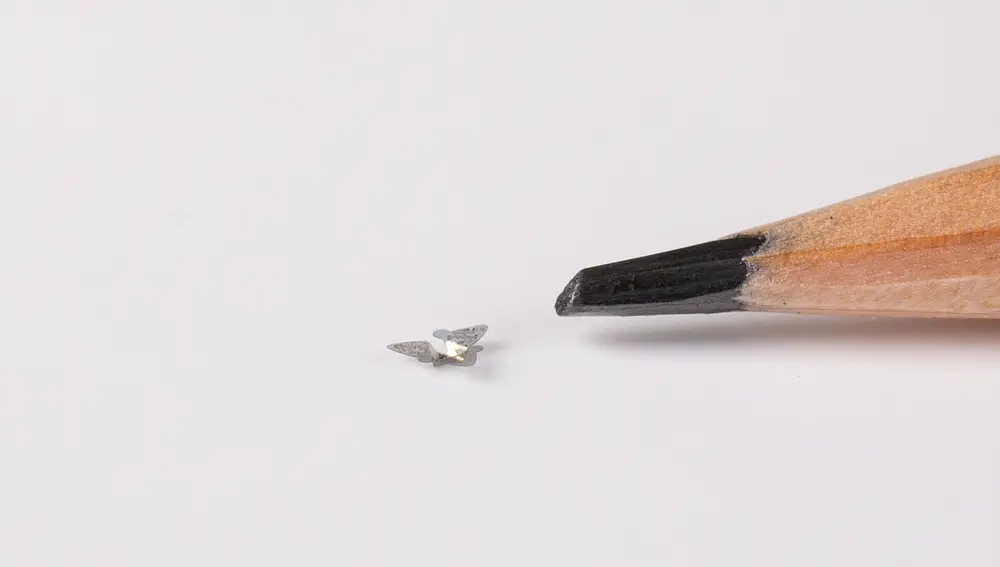
Con un tamaño de apenas medio milímetro de ancho, este “cangrejo” puede doblarse, retorcerse, arrastrarse, caminar, girar e incluso saltar. Los investigadores también desarrollaron robots de tamaño milimétrico que se asemejan a orugas, grillos y escarabajos. Aunque la investigación es solo exploratoria, los responsables, liderados por John Rogers, creen que su tecnología podría acercar el campo de la nanorobótica a la realización de robots destinados a actuar en espacios reducidos.
“La robótica es un campo de investigación emocionante, y el desarrollo de robots a microescala es un tema divertido para la exploración académica – explica el propio Rogers en un comunicado de la universidad ––. Este tipo de microrobots pueden reparar o ensamblar pequeñas estructuras o máquinas en la industria. O desempeñarse como asistentes quirúrgicos para limpiar arterias obstruidas detener hemorragias internas o eliminar tumores cancerosos, todo en procedimientos mínimamente invasivos”.
Más pequeño que una pulga, este “cangrejo” no precisa de un hardware complejo, piezas hidráulicas o eléctricas. En cambio, su capacidad reside en la resiliencia elástica de su cuerpo. Para construir el robot, el equipo de Rogers utilizó un material de aleación con memoria de forma que se transforma a su forma original cuando se calienta. Para ello los ingenieros utilizaron un rayo láser que calienta el robot en diferentes lugares específicos de su cuerpo. Una fina capa de vidrio devuelve elásticamente la parte correspondiente de la estructura a su forma deformada al enfriarse.
“Nuestra tecnología permite una variedad de modalidades de movimiento controlado y puede caminar con una velocidad promedio de la mitad de la longitud de su cuerpo por segundo – agrega Yonggang Huang, coautor del estudio –. Esto es muy difícil de lograr a escalas tan pequeñas para los robots terrestres”.
A medida que el robot cambia de una fase a otra, se deforma y recupera su diseño original y eso es lo que produce el movimiento. El láser no solo controla de forma remota el robot para activarlo, sino que la dirección de escaneo del láser también determina la dirección de marcha del robot.
“Debido a que estas estructuras son tan pequeñas, la tasa de enfriamiento es muy rápida – añade Rogers –. De este modo reducir el tamaño de estos robots es lo que les permite moverse más rápido”.
Para fabricar una criatura tan pequeña, Rogers y Huang recurrieron a una técnica que introdujeron hace ocho años: un método de ensamblaje inspirado en los libros desplegables propios de literatura infantil.
“Con estas técnicas de ensamblaje y conceptos de materiales, podemos construir robots móviles de casi cualquier tamaño o forma 3D – concluye Rogers –. Pero los estudiantes se inspiran y divierten con los movimientos laterales de los cangrejos. Fue un capricho creativo”.
✕
Accede a tu cuenta para comentar


