


Medicina
Este robot entra en tus venas y es capaz de completar una cirugía
Lo hace de forma autónoma basándose en un mapa de las arterias y venas
El uso de robots en medicina es cada vez más frecuente, ya sea para análisis o para intervenciones complejas. Pero en general se trata de robots de gran tamaño. Pero desde hace unos años los nanorobtos se han hecho con un espacio muy importante en este campo. Y ahora, en un avance de gran calibre, un equipo de expertos ha conseguido diseñar un robot capaz de entrar en nuestras venas y completar una cirugía.
Cuando una persona tiene una arteria o un vaso sanguíneo bloqueado, un equipo de cirujanos debe pasar con cuidado un catéter ultradelgado a través del vaso sanguíneo de la persona para llegar a la lesión o al área bloqueada. Pero los cirujanos deben estimar la posición del catéter desde el exterior del cuerpo del paciente mediante rayos X.
"El procedimiento implica largas horas de operación – señala Gunhee Jang, líder del equipo que desarrolló el robot – porque es difícil apuntar con precisión a una lesión si el vaso sanguíneo tiene una forma compleja o está totalmente bloqueado".
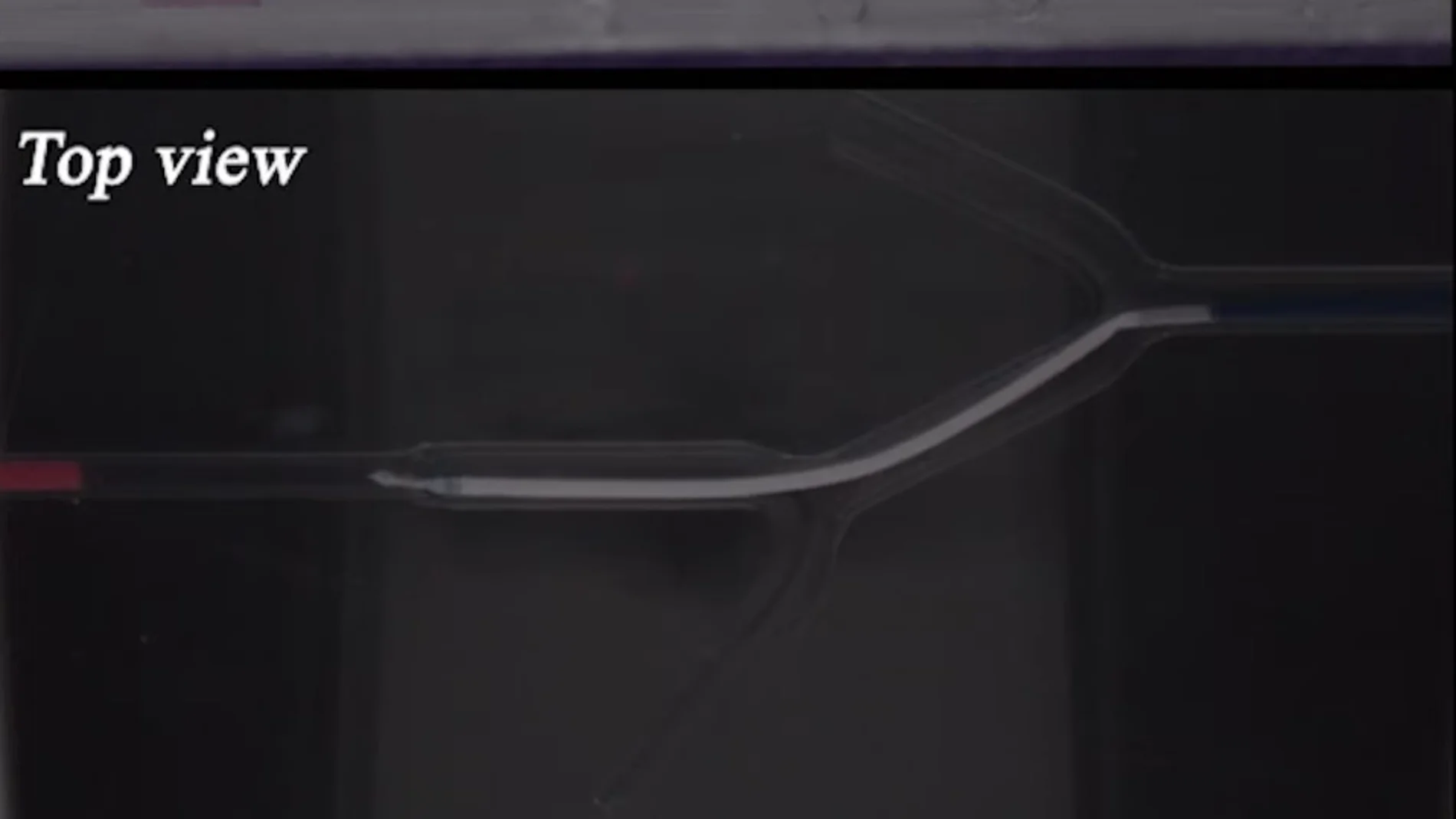
Para abordar estos problemas, el equipo de Jang ideó una solución utilizando un robot autónomo que es guiado externamente por imanes. El primer paso fue desarrollar un software que utiliza imágenes de rayos X en 2D tomadas desde diferentes ángulos para crear un mapa en 3D de los vasos sanguíneos del paciente. El robot usa el mapa 3D para navegar de forma autónoma y realizar los tratamientos programados. Para que llegue a la zona definida se usa un catéter para inyectar el robot en un vaso sanguíneo cerca del área de tratamiento, y el campo magnético externo crea un movimiento de rotación para desenganchar el robot del catéter. Luego, el campo magnético externo se usa para guiar al robot al lugar de tratamiento a través del mapa 3D.
Una vez que el robot llega a la parte de la arteria o vaso sanguíneo que necesita tratamiento, puede realizar una serie de tareas, que incluyen globo, succión de coágulos de sangre o administración localizada de medios de contraste o medicamentos. Una vez que se completa la tarea del robot, el sistema magnético externo guía al robot de regreso al catéter y se retira el del cuerpo. Las técnicas se han probado en ocho oportunidades distintas en cerdos vivos y también en simulaciones.
✕
Accede a tu cuenta para comentar


